Onderwerpen:
- Algemeen
- Onderdelen van de ruitenwissermotor
- Ruitenwissermotor aansluiten
- Ruitenwissermotor plus geschakeld
- Van de theorie naar het schema van de fabrikant
- Ruitenwissermotor met twee snelheden
- LIN-bus gestuurde ruitenwissermotor
Algemeen:
De achterruitenwissermotor zit gemonteerd in de achterklep van de auto. Er zit een gat in de ruit of in het plaatwerk van de achterklep waar de as van de wissermotor door uitsteekt. Op deze as wordt de ruitenwisserarm gemonteerd met het ruitenwisserblad. De as kan uiteraard geen volledige rotaties maken, omdat dan niet alleen de achterruit, maar ook de rest van de achterklep of achterbumper wordt schoongeveegd door het ruitenwisserblad. Daarom zit er in de motor een mechaniekje welke er voor zorgt dat de as een beweging kan maken van maximaal 180 graden.

De achterruitenwissermotor heeft altijd één snelheid. Met de ruitenwisserschakelaar kan deze worden in- en uitgeschakeld en meestal zit er een interval op; na het inschakelen zal de motor om de aantal seconden aangestuurd worden.
De ruitenwisser komt altijd in de beginstand terug nadat deze uitgeschakeld is. Wanneer dat niet zou gebeuren, dan zou de ruitenwisserarm halverwege de ruit stil komen te staan wanneer de schakelaar op de stand “uit” wordt gezet. In plaats van dat de voedingsspanning van de motor wegvalt, blijft deze erop staan totdat het nulpunt is bereikt.
Onderdelen van de ruitenwissermotor:
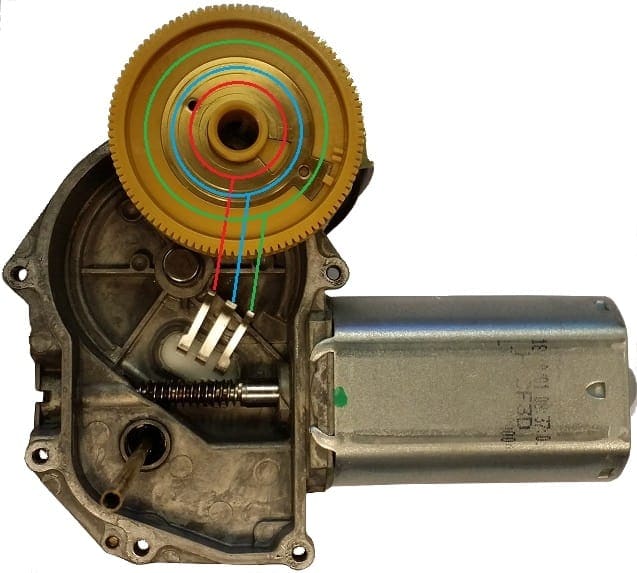
Om de ruitenwisserarm weer naar de beginstand te laten bewegen, bevat deze inwendig een contactplaat met sleepcontacten. Met behulp van de volgende afbeeldingen wordt uitgelegd hoe de ruitenwissermotor werkt.
De achterplaat van de ruitenwissermotor is hierbij gedemonteerd. De rode pijl geeft aan waar het ronde nokje van het mechaniek in de achterplaat heen-en-weer beweegt. Het mechaniekje zorgt ervoor dat de ronddraaiende beweging van het gele plastic tandwiel wordt omgezet in een heen-en-weergaande beweging van de uitgaande as. De uitgaande as staat in de afbeelding rechtop. Op deze as wordt de ruitenwisserarm gemonteerd.

De afbeelding rechts toont de opengewerkte ruitenwissermotor met het wormwiel en het plastic tandwiel. Hier is het mechaniekje gedemonteerd.

De volgende tekst heeft betrekking tot de onderstaande afbeelding. Het gele plastic tandwiel is nu omgedraaid. Hier zijn duidelijk de inkepingen en uitsparingen van de geleidende contactschijf zichtbaar. Met rood, blauw en groen is aangegeven op welke positie de sleepcontacten de contactschijf raken.
Om inzichtelijk te maken op welke posities de sleepcontacten contact maken met de geleidende contactplaat, zijn deze met de kleuren rood, blauw en groen aangegeven. Hieronder staat waar de sleepcontacten voor zijn:
Rood: Hier staat altijd 12 volt op bij ingeschakeld contact.
Blauw: Dit sleepcontact is verantwoordelijk voor de nulstand.
Groen: Dit is de massa. Hiermee is de motor verbonden in de nulstand.
De drie sleepcontacten “slepen” bij draaiende motor over de goudkleurige contactplaat. In de contactplaat zijn een inkeping en een uitsparing aangebracht. De sleepcontacten raken dus nooit alle drie tegelijk de contactschijf. De middelste (met blauw aangegeven) is verantwoordelijk voor de beweging naar de nulstand. De contactplaat is geleidend; als de motor nog niet in de beginstand staat, dan hebben de binnenste (rode) en de middelste (blauwe) sleepcontacten verbinding met elkaar. De spanning wordt via de contactplaat van het rode naar het blauwe contact overgebracht. Daardoor kan de motor net zo lang doordraaien, tot het rode sleepcontact de inkeping bereikt. Deze kan op dat moment geen spanning meer doorgeven aan de blauwe. De aansturing van de motor is daarbij gestopt.
Op dat zelfde moment maakt het buitenste sleepcontact via de uitsparing (met groen aangegeven) via de contactplaat contact met het blauwe sleepcontact. Het groene sleepcontact is aangesloten op de massa van het voertuig. Dit sleepcontact werkt als een soort rem. De ruitenwissermotor komt hiermee tot stilstand. De massa wordt via groen aan blauw doorgegeven. De motor staat aan beide zijden kortgesloten met massa en blijft dus in de nulstand staan.
Ruitenwissermotor aansluiten:
Om de bedrading van de ruitenwissermotor aan te sluiten, dient eerst de werking van o.a. de contactplaat en de sleepcontacten bestudeerd te worden. Pas als men begrijpt op welke punten er spanningen komen te staan, kan er overgegaan worden op het meten en het aansluiten van de bedrading.
De kabelboom in de achterklep voor de achterruitenwissermotor bestaat vaak uit drie of vier draden. Op deze draden dient een constante spanning, geschakelde spanning en een massa gemeten te worden. Op de overgebleven draad waar niets op gemeten wordt, komt vaak een voedingsspanning (bij een massageschakelde motor) óf een plus (bij een plusgeschakelde motor) te staan wanneer de motor zich in de ruststand bevindt. Op deze draad zal dus pas een meting verricht kunnen worden wanneer alle draden aan zijn gesloten én de wissermotor in de beginstand staat. In alle andere gevallen wordt er niets gemeten.
Er bestaan plusgeschakelde en massageschakelde ruitenwissermotoren. Dat betekent dat de schakelaar zich aan de plus- of aan de massazijde van de elektromotor bevindt. Dit is heel belangrijk om te weten voordat men overgaat tot meten. In de onderstaande hoofdstukken wordt elke stap nauwkeurig beschreven. Let goed op de verschillen tussen de plus- en massageschakelde varianten!
Ruitenwissermotor plusgeschakeld:
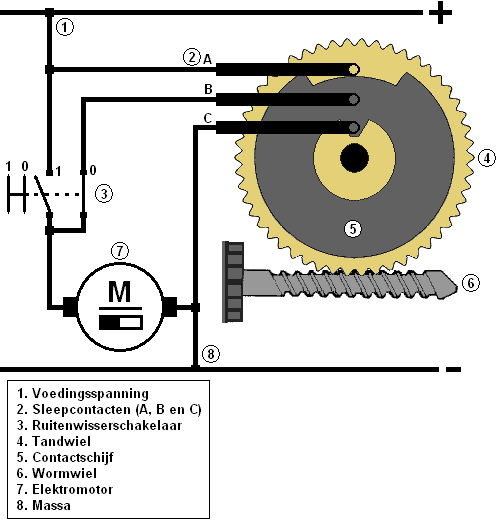
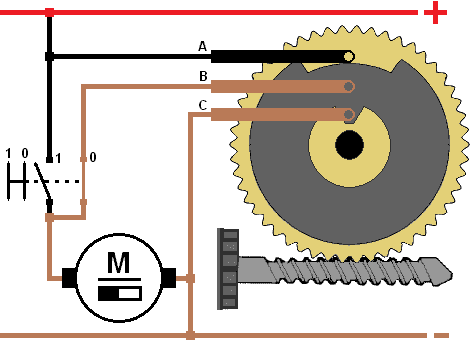
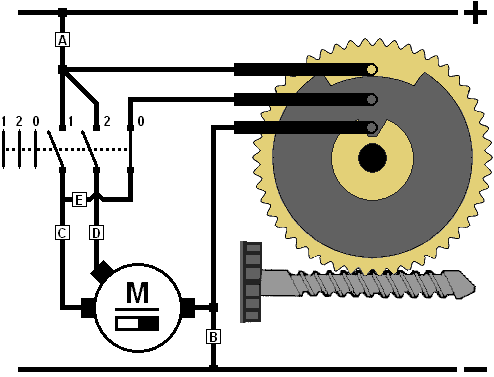
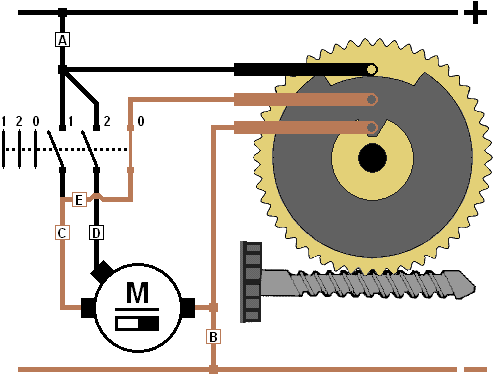
Aan de hand van de schema’s kan ook worden afgelezen hoe deze moet worden aangesloten bij bijvoorbeeld het beruchte onderdeel van het praktijkexamen. Hieronder is een schema met een legenda te zien van de plusgeschakelde achterruitenwissermotor. De ruitenwissermotor staat stil, en de schakelaar “0” staat gesloten.
De elektromotor (7) krijgt alleen bij een constant toerental de directe accuspanning. In dat geval is schakelaar 1 gesloten en schakelaar 0 geopend. De elektromotor (7) drijft het wormwiel (6) aan, welke op zijn beurt het tandwiel (4) laat draaien. De grijze geleidende contactschijf zit aan het plastic tandwiel bevestigd en zal dus ook mee gaan draaien. Wanneer de ruitenwisserschakelaar in de uitstand wordt gezet, zorgen de contactschijf (5) en de sleepcontacten A, B en C (2) dat de motor in de goede positie stil komt te staan. Dit wordt in hieronder verduidelijkt.
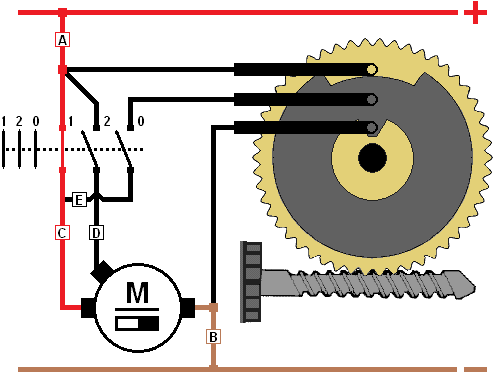
Ruitenwissermotor ingeschakeld:
In deze situatie is de ruitenwissermotor ingeschakeld. De voedingsspanning wordt geleverd via de rode plusdraad. De schakelaar 1 is gesloten, waardoor de motor een constante voedingsspanning krijgt. De andere kant van de motor staat aan massa, dus de motor zal met een constant toerental gaan draaien. Het wormwiel wordt aangedreven door de ruitenwissermotor en zal dus mee gaan draaien. In dit geval heeft dat geen invloed op de spanningsvoorziening van de motor.
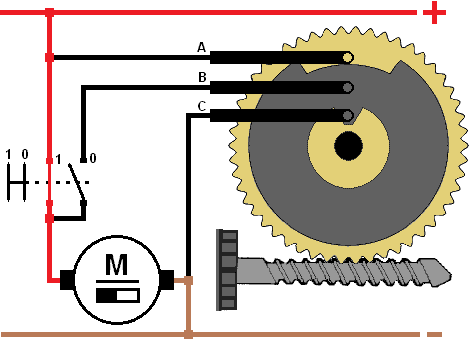
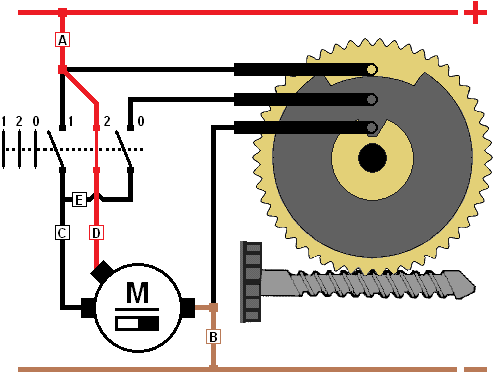
Schakelaar in stand uit, ruitenwisser beweegt nog:
In de onderstaande afbeelding is de ruitenwisserschakelaar op de stand “uit” gezet. Daarmee is schakelaar 1 geopend en de schakelaar 0 (van de nulstand) gesloten. Op dit moment loopt er een stroom via sleepcontact A, via de grijze contactplaat naar sleepcontact B. De stroom loopt dan vanaf sleepcontact B, via schakelaar 0 naar de wissermotor. Omdat het tandwiel via het wormwiel door de wissermotor wordt aangedreven, zal de contactplaat ook verdraaien. Totdat de inkepingen van de contactplaat weer bovenaan komen te staan, zal de motor door blijven draaien.
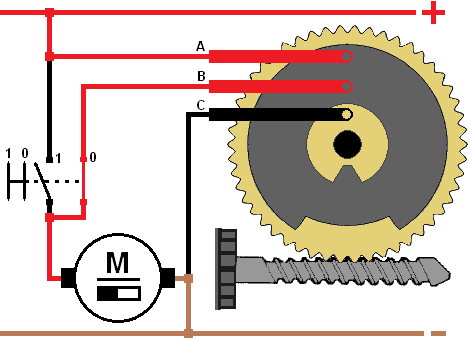
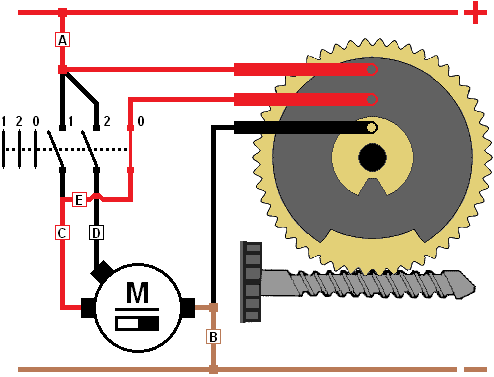
Schakelaar in stand uit; ruitenwisser stopt:
Het tandwiel draait verder totdat de inkepingen van de contactplaat bovenaan komen te staan. Daarmee wordt het contact tussen de sleepcontacten A en B onderbroken. Sleepcontact A wordt door het (gele) plastic tandwiel geïsoleerd, waardoor er geen stroom meer kan lopen naar sleepcontact B. Er zal dan ook geen stroom meer lopen naar de ruitenwissermotor. Wanneer de contactplaat ver genoeg verdraaid is, maakt sleepcontact C ook contact met het kleine geleidende deel van de contactplaat. Op dit moment zijn de sleepcontacten B en C met elkaar verbonden. Omdat C altijd met de massa verbonden staat, maakt B via de contactplaat nu ook contact met massa. De ruitenwissermotor is op dit moment aan beide kanten verbonden met massa, zodat deze direct stil komt te staan. Dit werkt dus in feite als een soort rem. De ruitenwissermotor stopt op deze manier altijd op dezelfde plaats.
Animatie:
In deze animatie zijn de verschillende standen van de schakelaar en de contactplaat goed te zien. Hier volgt een korte samenvatting van de uitleg die hierboven is gegeven.
- uitgeschakeld: de schakelaar staat in de nulstand en de elektromotor is met de plus en massa kortgesloten.
- ingeschakeld, constant toerental: de schakelaar staat in stand 1 en de contactplaat maakt twee omwentelingen rechtsom. In deze stand wordt de contactplaat niet gebruikt.
- Schakelaar stand 0, draait naar nulstand: de contactschijf zorgt voor de stroomtoevoer naar de motor, totdat de inkepingen de sleepcontacten hebben bereikt.
- A-B (plus onderbroken), B-C maken contact. Dit heeft een remmende werking op de motor, die dan ook vrijwel direct stilstaat.

Op het moment dat er bijvoorbeeld bij een praktijkexamen bekabeling moet worden aangesloten, moet er worden gezocht naar de juiste standen van de schakelaar. Met het schema van de ruitenwissermotor kan er worden afgelezen welke pin in de stekker er verantwoordelijk is voor de voeding, massa of de nulpositie. Door in de kabelboom van de auto te meten op welke draad 12 Volt staat, kan deze alvast aangesloten worden. Met behulp van een weerstandmeting kan bepaald worden welke aansluiting de massa is. De Ohmmeter zal bij deze aansluiting een weerstandwaarde van minder dan 1 Ohm aangeven. Daarbij moet de mindraad uiteraard wel op een goed massapunt van de carrosserie gehouden worden. Door vervolgens de schakelaar in meerdere standen te bewegen, kan er gezocht worden welke draad er bij welke stand van de schakelaar hoort. Vervolgens kan er met behulp van het schema worden bepaald welke draden er aan elkaar aan moeten worden gesloten.
Van de theorie naar het schema van de fabrikant:
De theorie van de achterruitenwissermotor is in de vorige paragraaf behandeld. In de schema’s kan duidelijk worden vastgesteld hoe de contactplaat in de opengewerkte ruitenwissermotor ervoor zorgt dat de motor spanning krijgt om terug te draaien naar de beginpositie. In deze paragraaf wordt uitgelegd hoe dit schema kan worden vertaald naar een schema van een fabrikant.
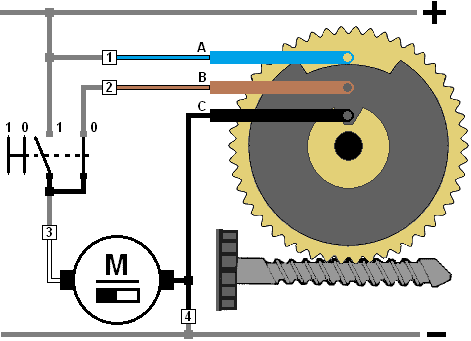
Het onderstaande elektroschema is gebaseerd op de achterruitenwissermotor van een Hyundai Getz. De draadkleuren (blauw, bruin, wit en zwart) komen overeen met de kleuren van de auto.
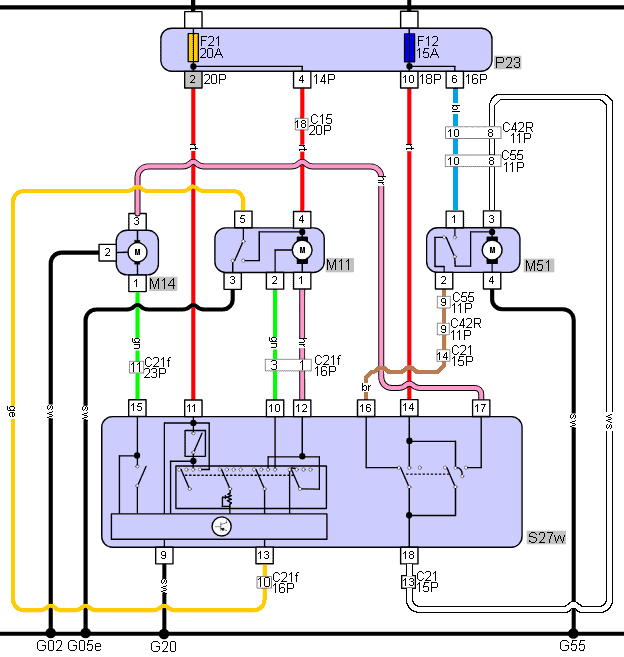
Nummers 1 t/m 4 in het schema rechts en onder tonen de pinnen van de stekker waarmee de ruitenwissermotor met de kabelboom van de auto is verbonden. De nummers en draadkleuren in beide schema’s komen overeen. Het onderstaande schema is opgevraagd uit HGS-data.com. De achterruitenwissermotor heeft hierin de componentcode: M51.
In beide schema’s is te zien dat de blauwe draad (pin 1 in de stekker) de constante plusdraad is vanaf de zekering. De bruine draad (pin 2) is verantwoordelijk voor het terugdraaien naar de nulstand. In het onderstaande schema is de contactplaat als mechanische schakelaar weergeven. De geschakelde plusdraad vanaf de schakelaar is verbonden met de witte draad (pin 3). De zwarte draad is de massadraad (pin 4) en is verbonden met een massapunt op de carrosserie (G55).
In de ruststand is de elektromotor kortgesloten met massa; de witte en bruine draden maken middels de contactschijf verbinding met elkaar.
Ruitenwissermotor met twee snelheden:
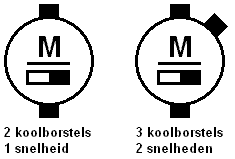
Tot nu toe is alleen gesproken over de ruitenwissermotor met één snelheid. Deze is geschikt voor de achterruit. De ruitenwissermotor van de voorruit kan vaak met twee verschillende snelheden draaien, namelijk de normale snelheid die bij zowel de interval (eerste stand van de schakelaar) als continue wissen (tweede stand) en de hoge snelheid (de derde stand). Tussen de tweede en derde stand van de ruitenwisserschakelaar zit dus een snelheidsverschil waarmee de elektromotor draait. Dit wordt bereikt door het toepassen van meerdere koolborstels. In de wissermotor met één snelheid zitten er twee koolborstels, in de wissermotor met twee snelheden zitten er drie. In de afbeelding rechts staan de symbolen van een wissermotor met één en met twee snelheden.
Bij de hogere snelheid zijn er minder ankerwikkelingen ingeschakeld. De tegenspanning die wordt opgewekt door het draaien van het anker is nu kleiner. Doordat er minder tegenspanning wordt opgewekt, maakt het anker, dus uiteindelijk de hele elektromotor, een hoger toerental.
Het schema van de wissermotor met twee snelheden lijkt sterk op het schema dat hierboven al behandeld is. De ruitenwissermotor is hier weer plus geschakeld.
Er zijn nu drie standen van de schakelaar te zien.
– Stand 1: lage snelheid, constant draaien.
– Stand 2: hoge snelheid, constant draaien.
– Stand 0: uitschakelen, terugdraaien naar beginpositie (nulstand).
In het schema rechts is de eerste stand ingeschakeld. Dit is de lage snelheid.
Hier is stand 2 ingeschakeld. Nu krijgt de motor de plus via een andere koolborstel. Er heerst nu een lagere tegenspanning in de elektromotor, waardoor het toerental hoger ligt dan bij de aansluiting van de andere koolborstel.
In dit schema is stand 0 geselecteerd. De motor wordt uitgeschakeld, maar gaat eerst nog terug naar de beginpositie. De contactplaat verbindt de sleepcontacten A en B met elkaar, zodat de wissermotor nog een voedingsspanning heeft. Wanneer de contactplaat 180 graden verder verdraaid is, wordt het contact tussen de sleepcontacten A en B onderbroken, waardoor de voedingsspanning wegvalt.
De werking met de contactplaat en de sleepcontacten zijn hetzelfde als bij de wissermotor met 1 snelheid.
In deze situatie is de contactplaat weer verdraaid, waardoor nu de sleepcontacten B en C contact met elkaar maken. De motor staat nu aan beide kanten aan massa. In deze positie blijft de wissermotor net zo lang staan totdat deze weer opnieuw wordt ingeschakeld.
LIN-bus gestuurde ruitenwissermotor:
De eerder genoemde systemen maken gebruik van aansturingen van spanningen die afkomstig zijn van de ruitenwisserschakelaar. Bij moderne auto’s wordt steeds vaker gebruik gemaakt van een aansturing via LIN-bus. Het regelapparaat stuurt de ruitenwissermotor aan. Meerdere inputs, van zowel de schakelaar (S) als de regen- / lichtsensor (RLS) zorgen voor een signaal naar de ECU om de ruitenwissermotor (RWM) in te schakelen, met een andere snelheid te laten wissen of uit te schakelen.
Het schema toont de componenten die voor de aansturing van de ruitenwissermotor zorgen.
De schakelaar (S) is met de drie groene draden verbonden met de ECU. Via deze draden wordt de stand van de schakelaar doorgegeven.
De schakelaar heeft dus geen directe verbinding met de RWM, zoals met de conventionele aansturing wel het geval was. De RLS krijgt zijn voeding van de ECU (12 volt), krijgt zijn massa via een massapunt en geeft zijn signaal via de LIN-busdraad door naar de andere aangesloten componenten. De RWM wordt aangestuurd door middel van een signaal op de LIN-bus. Het regelapparaat in de RWM (te herkennen aan het transistorteken) zorgt voor de daadwerkelijke aansturing van de elektromotor.

Bij de conventionele ruitenwissermotor zorgde de stand van de geleidende contactplaat voor de beweging naar de nulstand. Bij een LIN-bus gestuurde ruitenwissermotor is deze contactplaat vervangen door een positieschijf en Hall-sensoren. De stand van de positieschijf is afhankelijk van de stand van het kunststof tandwiel, en dus van de stand van de ruitenwisserarm. De positieschijf is opgedeeld in een aantal noord- en zuidpolen (de N van North en de S van South). Omdat elke noord- en zuidpool op de positieschijf een andere grootte heeft, kan de regeleenheid in de RWM d.m.v. de Hall-sensoren de exacte stand van het tandwiel bepalen. Wanneer de RLS of de schakelaar de aansturing van de ruitenwissermotor beëindigt, stuurt de regeleenheid in de RWM de elektromotor net zo lang aan totdat de positieschijf de “nulpositie” bereikt heeft.
Voordelen van deze aansturing zijn:
- PWM-aansturing maakt het mogelijk om verschillende snelheden te kunnen draaien.
- De draairichting van de elektromotor kan omgekeerd worden; bij het rechtsom draaien bewegen de ruitenwisserarmen omhoog en met linksom draaien bewegen de ruitenwisserarmen omlaag. Dit maakt een kleinere inbouwruimte voor het ruitenwissermechaniek mogelijk.
- De nulpositie kan variëren; door de ruitenwisserbladen soms een heel klein beetje omhoog te bewegen, kantelt het rubber van het ruitenwisserblad de andere kant op. Het ruitenwisserblad neemt nu niet altijd op dezelfde positie op de voorruit in. Dit heeft een positieve invloed op de levensduur van het ruitenwisserblad.
Het LIN-bussignaal kan met een oscilloscoop worden gemeten. Het getoonde scoopbeeld is van de communicatie tussen de ECU (de master) en de regen-/ lichtsensor en de ruitenwissermotor (de slaves).

Op de pagina LIN-bus wordt de opbouw van een LIN-busbericht beschreven. Ook wordt de communicatie van het ruitenwissersysteem uitgebreid beschreven en wordt uitgelegd hoe storingen in het LIN-bussignaal kunnen worden herkend.
Gerelateerde pagina’s: