Inleiding:
Onder de parkeerhulp vallen systemen die een bestuurder assisteren om in- en uit te kunnen parkeren. Het meest bekende parkeerhulpsysteem is het “park distance control”, afgekort als PDC. Dit systeem informeert de bestuurder van het voertuig over de afstand tot de auto achter, of bij uitgebreide systemen ook aan tot aan de voorzijde van het voertuig. Op deze pagina worden de moderne technologieën beschreven die óf een uitbreiding van de park distance control, óf een geheel op zichzelf staand hulpsysteem zijn.
Park distance control:
Park Distance Control (PDC) is een afstandswaarschuwingssysteem, dat bij het in- en uitparkeren signalen meet en informeert over de afstand tot het obstakel. In de achterbumper en vaak óók in de voorbumper zitten ultrasoonsensoren (zie afbeelding). Deze zenden een geluidsgolven met een hele hoge frequentie uit die niet waarneembaar zijn voor het menselijk gehoor. Deze ultrasoon frequenties weerkaatsen tegen objecten die zich in de buurt bevinden en worden weer door de sensor ontvangen. De sensor meet te tijd tussen het zenden en ontvangen van deze signalen. Hoe dichterbij het object is, hoe sneller het signaal weer terugkaatst. De sensor vangt het op en geeft het door aan de PDC regeleenheid (computer).
Deze computer kan het in geluidssignalen en met zowel beeld- als geluidssignalen doorgeven aan de bestuurder. Er is dan een piepend geluid hoorbaar, dat steeds sneller gaat piepen wanneer het object dichterbij komt. Bij een afstand van ongeveer 30 cm geeft hij een constante pieptoon, waardoor je als bestuurder weet dat je moet stoppen.

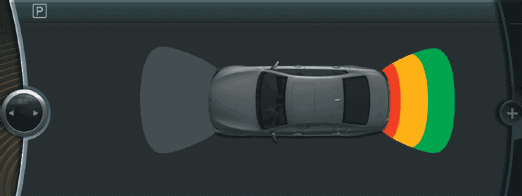
Moderne boordcomputers zijn vaak uitgerust met een optie waarbij de afstand tot het object op een beeldscherm wordt getoond. De PDC-sensoren zijn hetzelfde; de regeleenheid berekent de gegevens van de sensoren en verwerkt dit tot informatie dat het beeldscherm kan weergeven.
In de onderstaande afbeelding is de PDC-regeleenheid (ECU) te zien. In dit grijze vierkant bevinden zich de microcontroller, versterker en een EN-poort. De microcontroller zendt een blokspanning met een frequentie van ongeveer 40 kHz (zwart). Tevens wordt er periodiek een blokspanning met een lage frequentie uitgestuurd (rood / blauw). De EN-poort ontvangt de twee blokspanningen. Op het moment dat beide spanningen hoog zijn, is de uitgangsspanning (rechts van de EN-poort) hoog. Wanneer één van de twee spanningen laag is, wordt de uitgang ook laag. De uitgangsspanning wordt terug naar de microcontroller en naar de zender in de PDC-sensor gestuurd. De zender zendt het ultrasoonsignaal uit met een snelheid van ongeveer 300 m/s. Wanneer er een object in de buurt is, weerkaatst het ultrasoongeluid en wordt dit door de ontvanger geregistreerd. Dit noemen we de “driehoeksmeting”. De ontvanger stuurt het gevormde bloksignaal naar de ECU. Met behulp van een versterker wordt het bloksignaal versterkt om vervolgens door de microcontroller te worden verwerkt.
De tijd tussen het ontvangen van het uitgangssignaal van de EN-poort en de versterker is maat voor de afstand tot het object. Hoe kleiner de afstand is tussen de PDC-sensor en het object, hoe korter de tijd is. De microcontroller stuurt de zoemer aan, of communiceert via de CAN-bus met andere regeleenheden.
Het onderstaande stroomloopschema (VAG) toont de communicatie tussen de regeleenheden, inputs van schakelaars en outputs naar o.a. de zoemer.
De PDC-regeleenheid (J446) ontvangt de rijsnelheid en het achteruitrijsignaal via de CAN-bus. De PDC-regeleenheid stuurt via de aansluiting T12/11 een gemoduleerde blokspanning naar de kabellas (X86 in de achterbumper) die verbonden is met alle PDC-sensoren (G203, G334, G335 en G206). Iedere PDC-sensor heeft zijn eigen signaaldraad (via pin 2) naar de ECU. Verder is de massa van iedere sensor verbonden met een massalas (352).
Op het moment dat één of meerdere sensoren een object detecteren, stuurt de regeleenheid de zoemer (H15) aan. Afhankelijk van de afstand tot het object geeft de zoemer een sneller of minder snel onderbroken geluidssignaal.

Dankzij de communicatie met de diagnose interface (J533) bestaat de mogelijkheid de volgende diagnosefuncties uit te voeren:
- storingsgeheugen afvragen
- coderingen van het regelapparaat aanpassen (bijv. na het uitbreiden van het systeem met PDC-sensoren aan de voorzijde of na het inbouwen van een trekhaak)
- volume van de zoemer aanpassen
- meetwaardeblokken afvragen van o.a. de afstand van alle sensoren tot het object, de berekende afstand en de stabilisatietijd van de zender en ontvanger.
Achteruitrijcamera:
Naast de park distance control, kan de parkeerhulp ook zijn uitgevoerd met een achteruitrijcamera. Op het moment dat de bestuurder het voertuig in de achteruitversnelling zet of een knop in het interieur indrukt, wordt de camera aan de achterzijde van het voertuig geactiveerd. Meestal toont het beeldscherm van de radio of de boordcomputer het beeld.
In de onderstaande afbeelding is een beeldscherm van een BMW te zien met het beeld aan de achterzijde van het voertuig. Rechts naast het camerabeeld is een voertuig met aan de voor- en achterzijde een driedelig raster; hierin wordt de afstand tot een object weergeven dat de PDC-sensoren registreren.
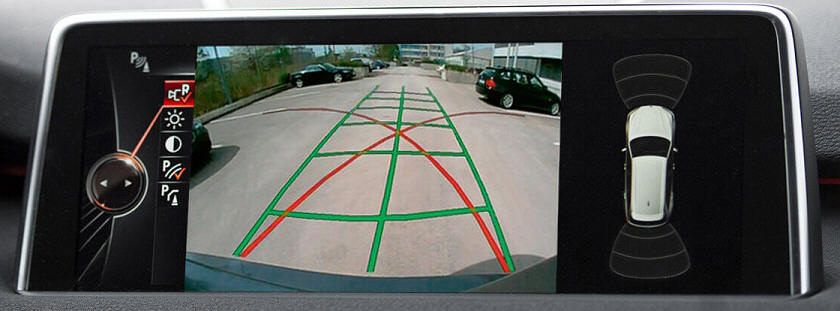
In het beeld van de achteruitrijcamera zijn rode en groene lijnen te zien. De rode lijnen tonen de mogelijke richting waarin het voertuig kan worden gestuurd; bij maximaal insturen zullen de wielen in de buitenbocht de rode lijn volgen. Het groene raster volgt de richting waarin het stuur is verdraaid; op dit moment staan de voorwielen rechtuit. Wanneer de bestuurder het stuurwiel verdraait, geven de groene lijnen de werkelijke rijlijnen aan. De stuurhoeksensor registreert de stand van het stuurwiel.
De achteruitrijcamera zit soms in het zicht en bevindt zich vaak in de buurt van de kentekenplaat en / of de handgreep om de achterklep te openen. Soms kiezen fabrikanten ervoor om de camera uit het zicht te monteren. De onderstaande afbeelding toont de achteruitrijcamera van een VW Golf, waarbij een elektromotor het VW-embleem kantelt om de camera naar buiten te bewegen. Het embleem klapt automatisch weer terug wanneer men weer vooruit rijdt. Niet alleen is de camera uit het zicht geplaatst, ook wordt de lens minder snel vies.

Side view:
Wanneer je achteruit tussen twee voertuigen of grote objecten staat ingeparkeerd, moet je een stukje vooruit rijden om naar links en rechts te kijken. Met een side view camera (ook wel corner view) is dit een stuk makkelijker; camera’s links en rechts in de voorbumper sturen het beeld naar het beeldscherm in het dashboard. De afbeelding toont het beeld van de hoekcamera’s. Camera’s kunnen helaas niet onzichtbaar worden gemonteerd. Auto’s die zijn uitgevoerd met een side view camera hebben in de bumper een (vaak) zwarte lens zitten. De onderstaande afbeelding toont de voorbumper van een BMW met de linker camera.


Surround view:
Onder de meest luxe parkeerhulpsystemen valt ongetwijfeld de “surround view”, ook wel top view, 3D of bird-view genoemd. Ieder merk geeft zijn eigen naam en kenmerk aan het systeem. We houden nu de benaming surround view aan.
Bij surround view wordt op het beeldscherm de bovenzijde van de auto getoond. Het lijkt net alsof er een camera op het dak van de auto en de omgeving er omheen kijkt. De auto is een simulatie en de omgeving wordt geregistreerd door meerdere (meestal vier) camera’s samengesteld.
De drie volgende afbeeldingen (afkomstig van BMW) tonen het beeld dat de bestuurder ziet. Tijdens het inparkeren zijn de afscheidingen van het parkeervak en de objecten, zoals paaltjes etc. duidelijk te zin. Bij het achteruit rijden kan worden ingezoomd op de achterkant; hier zijn vooral planten te zien. De conventionele PDC-sensoren registreren de afstand tot aan de planten. De computer markeert deze afstand met een rode kleur.

Tijdens het vooruit inparkeren kan met het systeem ook de omgeving en de voorkant worden getoond. Ook nu helpen PDC-sensoren mee om de afstand tot het hekwerk te bepalen.

Het fileparkeren langs een stoeprand kan, als de bestuurder niet goed oplet, zorgen voor beschadigingen van de banden en velgen. Ook nu biedt de surround view een uitkomst; dankzij het goede overzicht van het straatbeeld kan men kaarsrecht en dicht langs de stoeprand parkeren. De laatste ontwikkelingen van BMW maken het mogelijk om het beeld van de camera te inverteren en het voertuig te simuleren.

De volgende drie afbeeldingen tonen de plaatsen waar de camera’s zich veelal bevinden.



Uitparkeerhulp:
Als uitbreiding van de parkeerhulp kan de zgn. “uitparkeerhulp” de bestuurder assisteren bij het achterwaarts verlaten van een parkeerplek met beperkt zicht. Dat kan in situaties zijn waarbij het voertuig naast een muur of tussen voertuigen is geparkeerd.
De sensoren aan de achterzijde van de wagen detecteren verkeer dat achter het voertuig langs rijdt en mogelijk een risico op een aanrijding vormt. Daaronder vallen alle bewegende objecten die met een bepaalde snelheid het voertuig naderen. Wanneer het uitparkeerhulpsysteem een naderend voertuig detecteert, verschijnt op het display van het infotainmentsysteem een melding. Meestal wordt hier een akoestisch geluidsignaal aan toegevoegd. Negeert de bestuurder deze signalen en rijdt hij/zij toch achteruit, grijpt het systeem fysiek in door de remmen te bedienen het het voertuig te laten afremmen.
