Onderwerpen:
- Inleiding
- AC elektromotor (synchroon, met permanente magneten)
- AC-aansturing van de synchroonmotor
- AC elektromotor (asynchroon, kooiankermotor)
- Efficiency map van de synchrone en asynchrone elektromotor
Inleiding:
Voor de aandrijving van een hybride of volledig elektrisch voertuig wordt een elektromotor gebruikt. De elektromotor zet elektrische energie (afkomstig van de accu of range extender) om in een beweging voor de aandrijving van de wielen. Daarnaast kan de elektromotor bewegingsenergie ook omzetten in elektrische energie bij het afremmen op de motor: het regeneratief remmen. De elektromotor functioneert in dat geval als dynamo. Vanwege deze twee functies noemen we de elektromotor ook wel een “elektromachine”.
De plaatsingsmogelijkheden van de elektromotor bij een hybridevoertuig zijn:
- Aan de verbrandingsmotor, waarbij de overbrenging via een multiriem of direct via de krukas tot stand wordt gebracht;
- Tussen de motor en versnellingsbak in: de ingaande as van de versnellingsbak wordt door de elektromotor aangedreven;
- Geïntegreerd in de versnellingsbak;
- Aan het differentieel;
- Ter hoogte van de wielnaven (naafmotor).
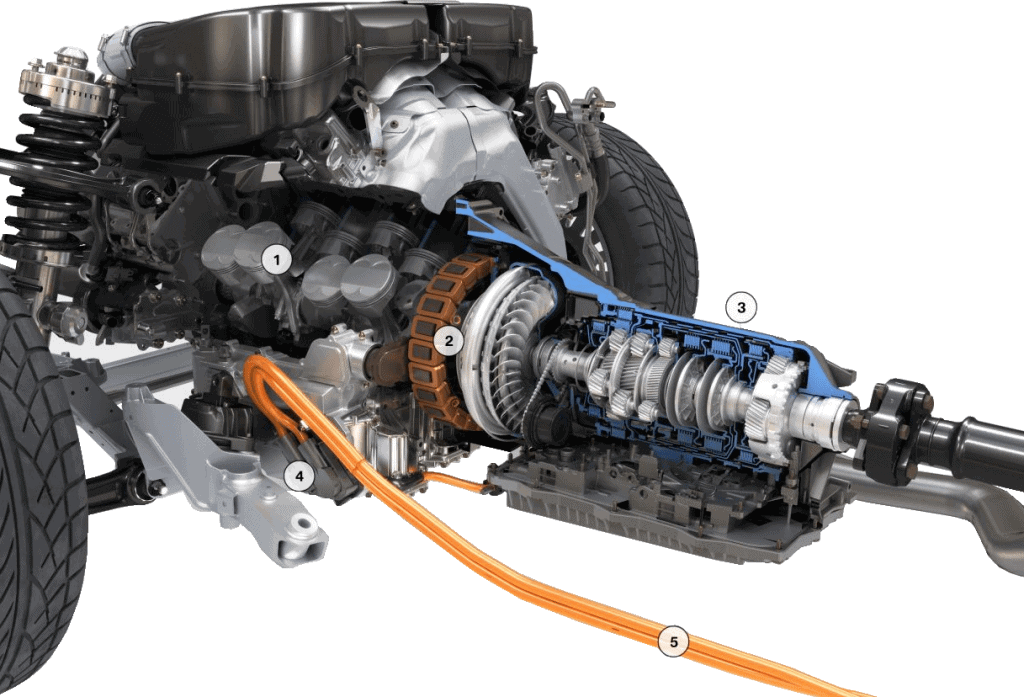
De elektromotor van een volledig elektrische auto zit vaak ter hoogte van de achteras gemonteerd. In de onderstaande afbeelding is de elektromotor met de inverter in cilindervormige behuizing en eindaandrijving van een Tesla te zien.

AC elektromotor (synchroon, met permanente magneten):
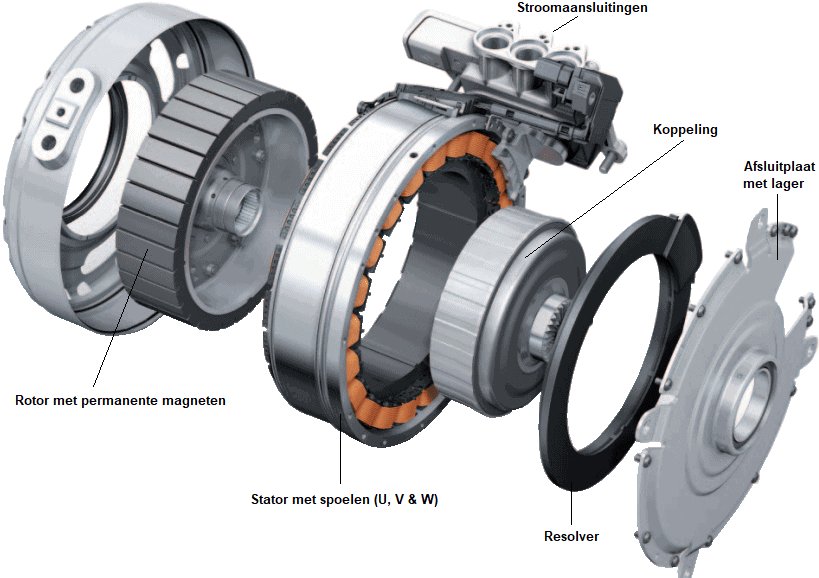
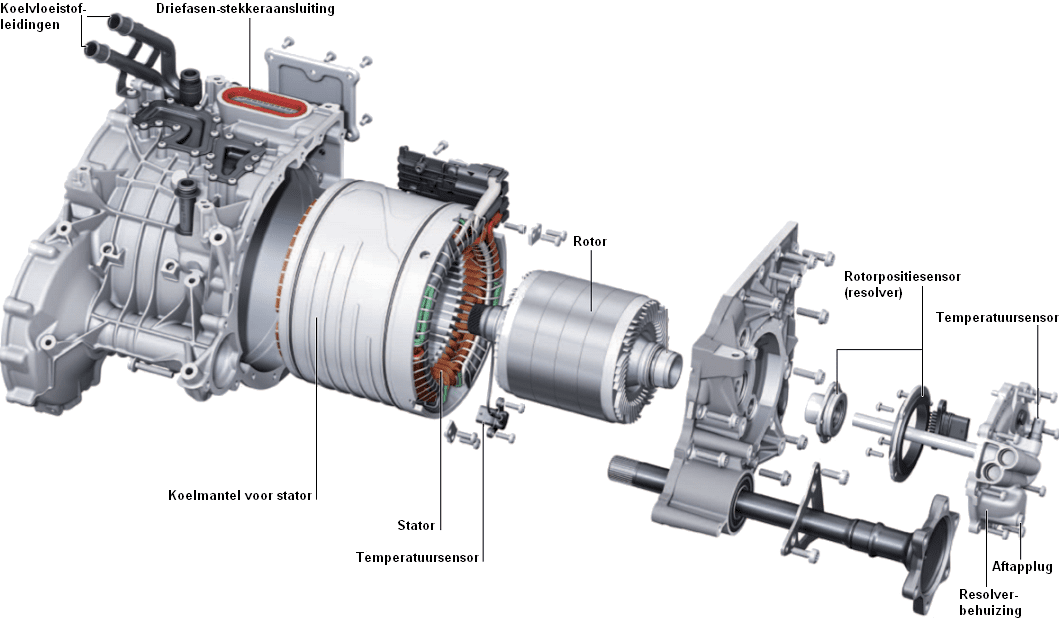
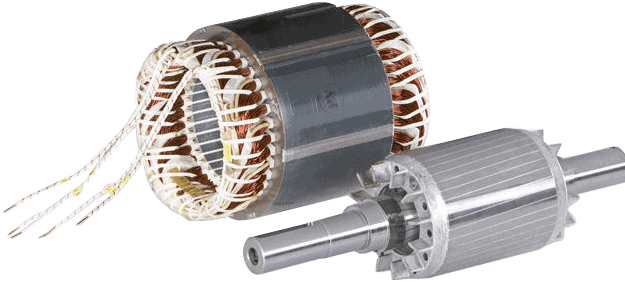
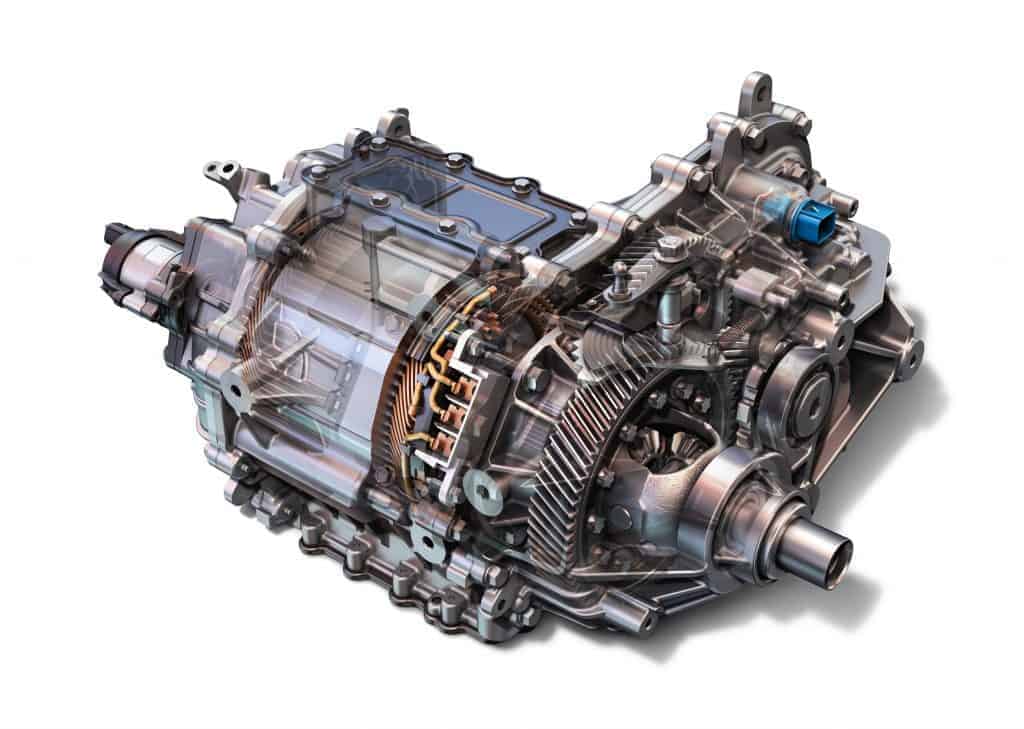
De volgende afbeelding toont de onderdelen van een (synchroon)elektromotor van een Audi. Dit type wordt gebruikt in de hybride-varianten van de A6 en A8. We zullen in het kort de onderdelen opnoemen. In de volgende paragrafen worden deze onderdelen uitgebreid beschreven.
De rotor met permanente magneten zal als gevolg van een verandering in het magnetisch veld in de stator gaan verdraaien. De rotor is verbonden met de koppeling, die de verbrandingsmotor en elektromotor (in samenwerking met een niet afgebeelde koppeling) in verschillende bedrijfsomstandig-heden met elkaar kan verbinden of verbreken. De stand van de rotor wordt door de resolver gemeten: deze gegevens zijn belangrijk voor de IGBT-drivers om de statorspoelen op het juiste moment aan te sturen.
De elektromotor met permanente magneten kan zowel door een DC- (gelijkspanning) als AC- (wisselspanning) worden aangestuurd.
De synchroonmotor is één van de meest toegepaste elektromotoren bij hybride- of volledig elektrische voertuigen. Dit type elektromotor bestaat uit een stator met wikkelingen en een rotor met meerdere permanente magneten. De rotor draait met hetzelfde toerental als het magnetische veld van de stator. De aansturing van de synchroonmotor kan als volgt worden gerealiseerd:
- AC: wordt aangestuurd door een sinusvormig signaal (wisselstroom).
- DC: wordt aangestuurd met een blok- of trapeziumvormig signaal (gelijkstroom)
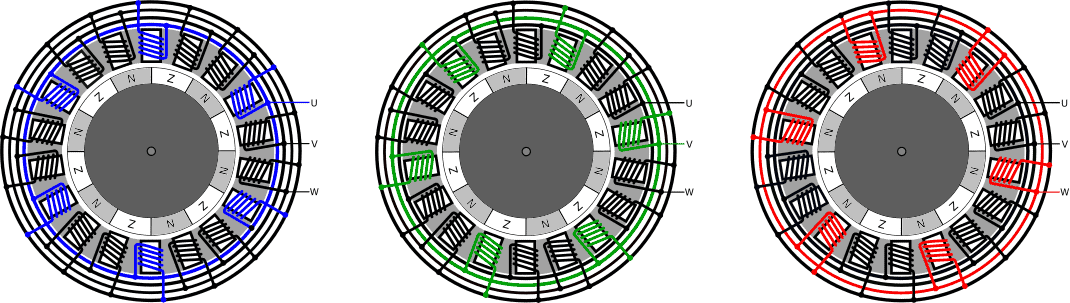
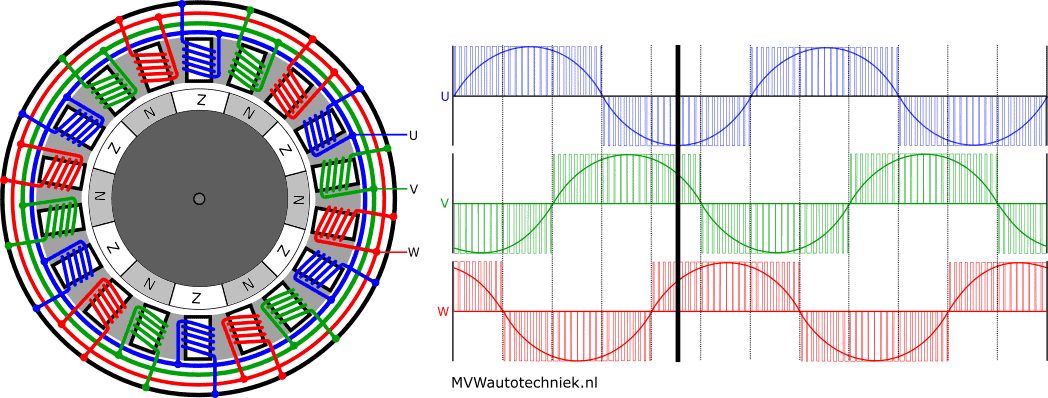
De stator van de synchroonmotor is opgebouwd uit drie statorspoel groepen: U, V en W. Iedere groep bevat drie sets van zes parallel geschakelde spoelen die verdeeld zijn over de gehele omtrek van de stator. Iedere derde spoel behoort tot dezelfde reeks.
- U-spoelen: blauw
- V-spoelen: groen
- W-spoelen: rood
De rotor bevat meerdere permanente magneten. Door spoelen in de stator wisselend te bekrachtigen, ontstaat er een draaiend magnetisch veld. De rotor volgt het draaiveld en gaat daardoor meedraaien.
AC-aansturing van de synchroonmotor:
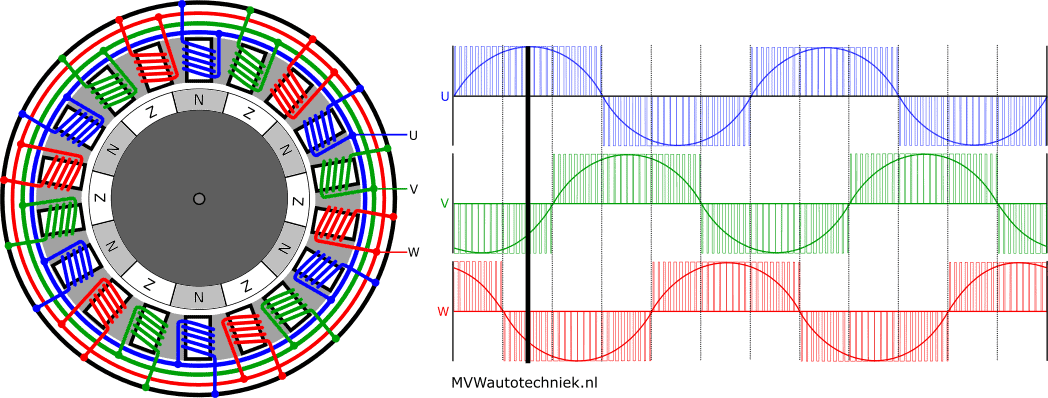
De AC-regeling maakt gebruik van een frequentiegeregelde aansturing of sinusvormige commutatie. De statorspoelen worden voorzien van een wisselende driefase sinusspanning om de rotor te laten draaien.
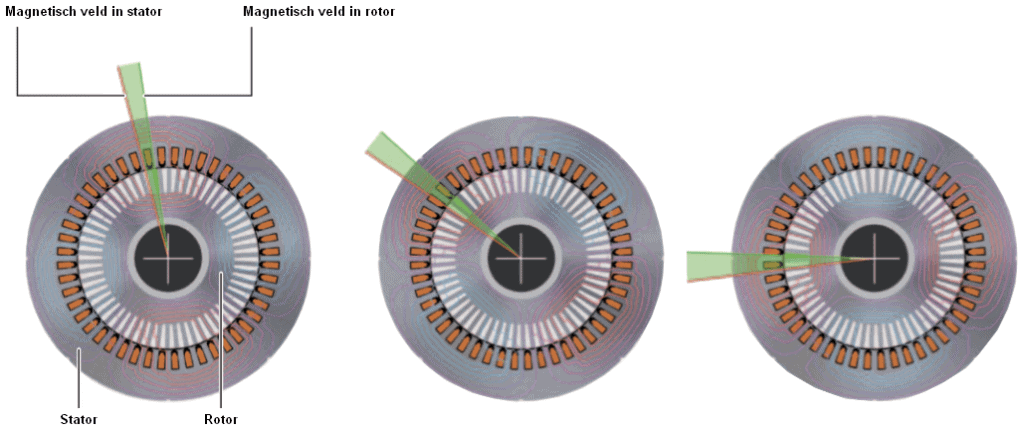
De onderstaande afbeelding toont de rotorstand bij een maximaal bekrachtigde U-spoel. De noordpolen zijn als gevolg van het magnetische veld recht tegenover de bekrachtigde U-spoelen gaan staan. De cursor in de grafiek naast de elektromotor geeft de aansturing van de spoelen op dat moment aan.
Ter informatie: de rotor in de uitleg draait bij het aansturen van de statorspoelen rechtsom.
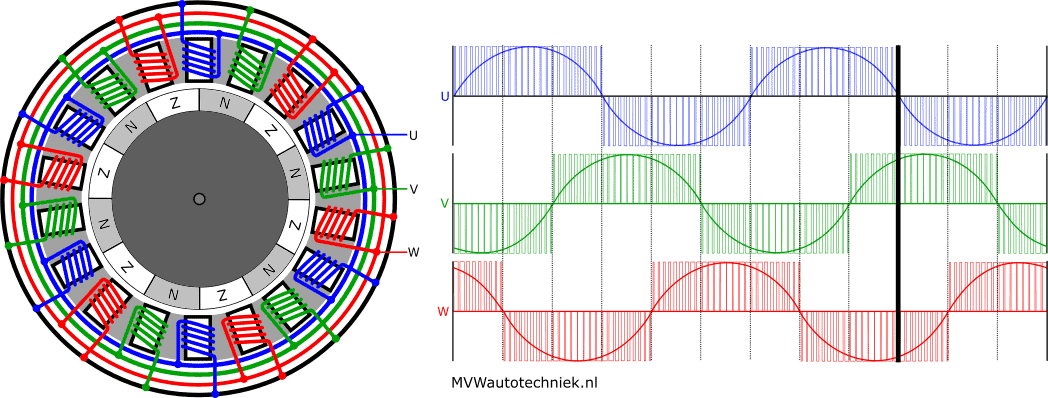
In de volgende afbeelding is de sinus, dus de wisselstroom door de U-spoel maximaal negatief. Tijdens deze aansturing staan de zuidpolen van de rotor recht tegenover de bekrachtigde (U)-statorspoelen.
Tussen de noord- en zuidpolen van de rotor zit in werkelijkheid een kleine luchtspleet. Tijdens de wisseling van de zuid- naar noordpool wisselt de stroomrichting in de U-spoel om. Verder:
- De stroomsterkte door de V-spoel (groen) is bijna maximaal positief; de noordpool staat hierbij ook bijna tegenover de spoel.
- De stroomsterkte door de W-spoel is maximaal negatief geweest en stijgt. De zuidpool is voorbij de spoel gedraaid.
Om een indruk te geven hoe de stroom verloopt, wordt in de onderstaande animatie de rotorverdraaiing ten gevolge van de wisselstroom weergeven.
AC elektromotor (asynchroon, kooiankermotor):
De kooianker- of kortsluitanker elektromotor is een asynchrone motor. Het verschil met de synchrone motor met permanente magneten en de asynchrone motor is zit in de rotor: dit is een weekijzeren trommel met geleiders in de lengterichting. De rotor loopt asynchroon met de stator, dat wil zeggen dat er een toerentalverschil is tussen de rotor en het magnetische toerental van de stator. De stator is exact hetzelfde.
De rotor van de asynchrone elektromotor bestaat uit kortgesloten spoelen; de U- V- en W-spoelen zijn aan één zijde met elkaar verbonden. Op het moment dat de rotor zich in het statordraaiveld bevindt, ontstaat in de rotorspoelen een inductiespanning. Omdat de rotorspoelen met elkaar zijn kortgesloten, gaat er een stroom door lopen. Deze stroom zorgt ervoor dat de rotor een magnetisch veld opwekt en er daardoor een koppel ontstaat. Omdat de werking van de asynchrone elektromotor op de inductiewet berust, noemen we hem ook wel een inductiemotor.
Het geleverde koppel heeft invloed op de slip tussen het draaiende magnetische veld in de stator en het toerental van de rotor.
De asynchrone motor heeft een aantal voor- en nadelen ten opzichte van de synchrone motor.
Voordelen:
- relatief eenvoudige, robuuste en goedkope rotor;
- hoog koppel bij een laag toerental.
Nadelen:
- lagere vermogensdichtheid (per massa) en efficiëntie (rendement). De stromen in de kortgesloten rotorspoelen geven aanleiding tot extra rotorverliezen;
- toerental is niet nauwkeurig te regelen, omdat deze afhankelijk is van de belasting. Op zich hoeft dit geen nadeel te zijn: met een goed regelsysteem kan ook het toerental van de asynchrone motor worden ingesteld;
- hoge aanloopstroom.
Van de asynchrone motor wordt de rotorstand en het toerental gemeten door een rotorpositiesensor. Veelal verzorgen Hall-sensoren minimaal vier pulsen per omwenteling van de rotor om de rotorstand en het toerental door te geven. Dit type rotorpositiesensor noemen we géén resolver, zoals bij de synchroonmotor wél het geval is.
In tegenstelling tot de synchrone motor is de rotorpositiesensor niet nodig om de rotorstand in stilstand te weten. De rotorstand is wél van belang tijdens het draaien: er dient te worden voorkomen dat de slip tussen het magnetische draaiveld en de rotor niet te groot wordt. Op het moment dat het draaiveld te snel gaat, kan er een situatie ontstaan dat de rotor ineens de andere kant op wil draaien. De krachten die hierin ontstaan kunnen desastreus zijn voor de mechanische en elektrische componenten.
Sommige fabrikanten kiezen ervoor om ook bij een asynchrone motor een resolver toe te passen. De reden is mij niet bekend. De resolver is zowel in stilstand als tijdens het draaien in ieder geval uiterst nauwkeurig, iets wat wellicht ten goede komt van de precieze aansturing.
Efficiency map van de synchrone en asynchrone elektromotor:
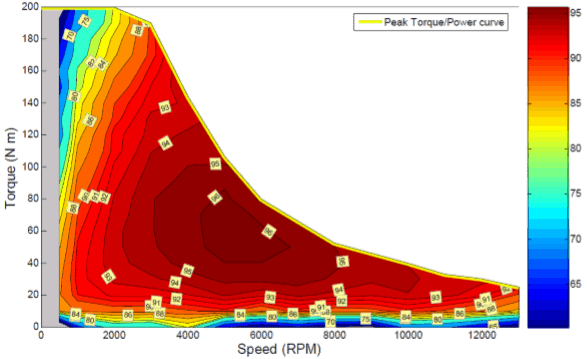
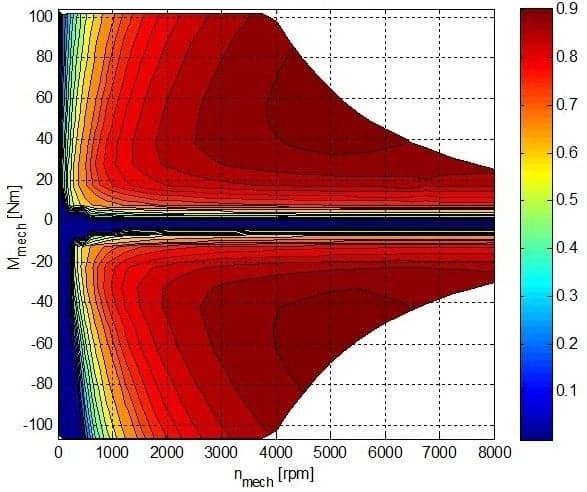
De onderstaande afbeeldingen tonen de efficiëntie van de synchrone elektromotor (links) en de asynchrone elektromotor (rechts).
- De synchrone elektromotor is zeer efficiënt. De efficiency is in een groot gebied boven de 90%, met piekwaarden tot wel 96%. Vanaf 2000 rpm treedt er veldverzwakking op, waardoor het maximale koppel afneemt.
- De asynchrone motor heeft bij lagere toerentallen een aanzienlijk lagere efficiency dan de synchrone motor.
Gerelateerde pagina’s: