Onderwerpen:
- Inleiding
- Werkingsprincipe elektromotoren
- DC elektromotor met koolborstels
- DC elektromotor als parallelmotor (shunt) of als seriemotor
- DC elektromotor zonder koolborstels
Inleiding:
Op steeds meer plaatsen in de auto vinden we elektromotoren. In een elektromotor wordt een elektrische stroom omgezet in een beweging en warmte. We vinden een elektromotor in de spiegel- en stoelverstelling, maar ook als ruitenwissermotor aan het ruitenwissermechaniek of als startmotor. Deze elektromotoren werken op een spanning van 12 tot 14 volt. Op deze pagina beperken we ons tot de elektromotoren in het interieur en exterieur.
Elektromotoren verzorgen ook de (deels) elektrische aandrijving in hybride en volledig elektrische voertuigen. Dit type elektromotor wordt behandeld op de pagina: HV-elektromotoren.
De DC-elektromotoren kunnen we onderverdelen in:
- Elektromotor met koolborstels (elektromagnetisch veld en anker)
- Serie-elektromotoren;
- Parallel-elektromotoren;
- Koolborstelloze elektromotoren.
Werkingsprincipe elektromotoren:
In een elektromotor wordt een elektrische stroom omgezet in een ronddraaiende beweging. De beweging ontstaat doordat twee magneetpolen elkaar aantrekken of afstoten:
- Een noordpool en zuidpool trekken elkaar aan;
- Twee noordpolen stoten elkaar af;
- Twee zuidpolen stoten elkaar af.
Een magneet heeft een noord- én zuidpool met een tegengestelde lading. Wanneer die magneet door midden wordt gebroken, heb je niet ineens twee losse polen, maar twee nieuwe magneten, met beide weer een noord- en een zuidpool.
Meerdere magneetpolen (noord- en zuid) staan vast aan de behuizing. Tussen de noord- en zuidpool heerst een magnetisch veld. De uitgaande as (het anker) draait als gevolg van verandering in het magnetisch veld.
In een elektromotor worden met behulp van (meestal) permanente magneten, of anders elektromagneten, constant twee gelijknamige polen tegenover elkaar worden geplaatst. Doordat de gelijknamige polen elkaar afstoten, ontstaat er een beweging.
DC elektromotor met koolborstels:
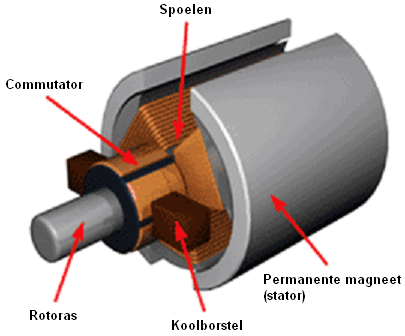
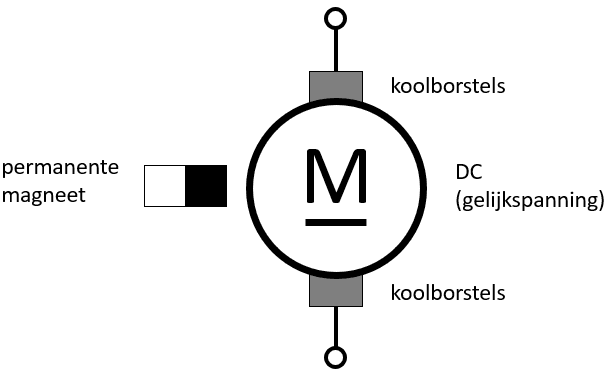
Bijna alle elektromotoren in de autotechniek zijn uitgevoerd als DC-motor met permanente magneten en koolborstels. In dit type elektromotoren vinden we de volgende magneten:
- Permanente magneten (één noordpool en één zuidpool): hiertussen heerst een stilstaand magnetisch veld;
- Spoelen: hierin wordt een elektromagnetisch veld opgewekt. In de spoelen wordt het roterende elektromagnetisch veld opgewekt.
De permanente magneten bevinden zich links en rechts van de rotor en bestaan uit één noordpool en één zuidpool. Tussen deze noord- en zuidpool heerst een stilstaand magnetisch veld welke niet verandert als de elektromotor in werking is of stil staat.
In de spoelen wordt een roterend elektromagnetisch veld opgewekt zodra er stroom doorheen loopt. De stroom wordt door de koolborstels via de commutator aan- en afgevoerd.
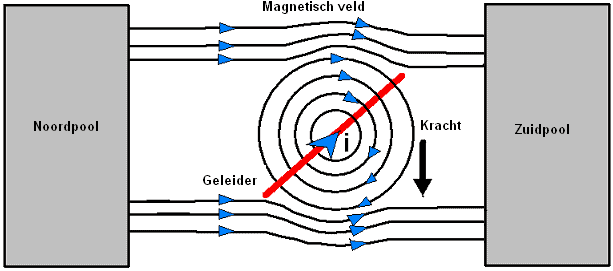
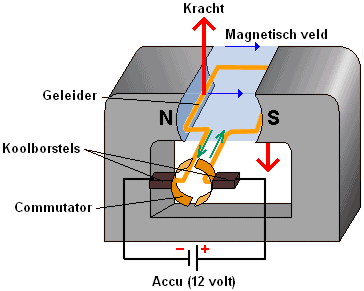
Het omkeren van de stroomrichting gebeurt door middel van commutatie: twee koolborstels slepen over de commutator, welke bestaat uit een plus- en minzijde. De koolborstel aan de pluszijde voert de stroom naar de geleider (groene pijlen in de afbeelding). De stroom verlaat de geleider via de koolborstel aan de minzijde. De stroom die door de geleider vloeit veroorzaakt een elektromagnetische veld.
Tussen het ontstane magnetisme in het anker (de geleider) en het veld (de permanente magneten) ontstaat een kracht (rode pijlen in de afbeelding). Deze kracht zorgt ervoor dat het anker en de commutator om hun as roteren. De koolborstels raken vervolgens het andere deel van de commutator, waardoor de stroomrichting in het anker omkeert. Het magnetisch veld en de kracht worden in dezelfde richting opgebouwd, zodat het anker weer om zijn as roteert.
De draairichting van de elektromotor (lees: het anker) kunnen we veranderen door de plus en min van de koolborstels om te draaien.
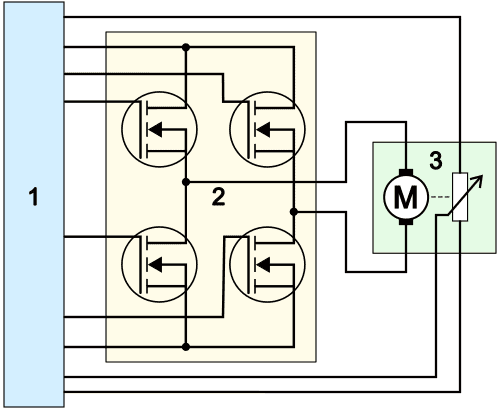
Het omwisselen van de plus en min kan door middel van commutatie verkrijgen (zoals hierboven is uitgelegd), of kan worden gerealiseerd door middel van een H-brug in een ECU-schakeling.
- De ECU (1) stuurt tegelijk twee van de vier transistoren of FET’s (4) aan;
- De FET’s (2) geven de elektromotor (3) een plus en massa. Afhankelijk van welke twee FET’s er in geleiding worden gebracht, is de bovenste koolborstel plus en de onderste massa, of andersom;
- De potentiometer naast de elektromotor registreert de positie en draairichting. Niet alle elektromotoren zijn met een potentiometer uitgevoerd.
Zie de pagina H-brug voor de mogelijke uitvoeringen en schakelmethodes van de H-brug.
DC elektromotor als parallelmotor (shunt) of als seriemotor:
Elektromotoren worden in voertuigen op verschillende manieren toegepast, afhankelijk van de vereisten voor koppel, snelheid en efficiëntie. We onderscheiden twee typen DC-motoren: de parallelmotor en de seriemotor. Deze worden hieronder uitgelegd.
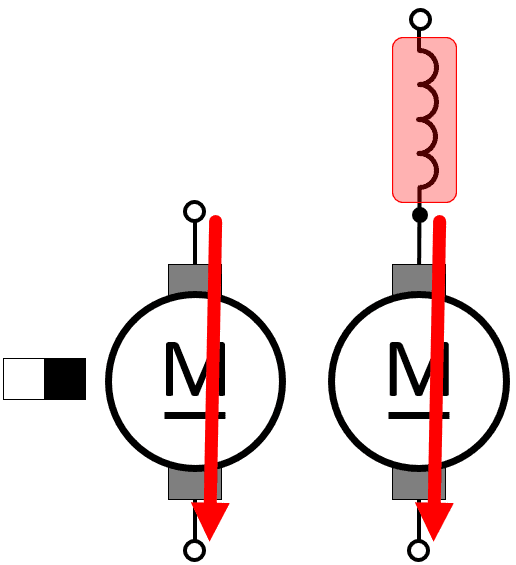
Parallelmotor (shuntmotor):
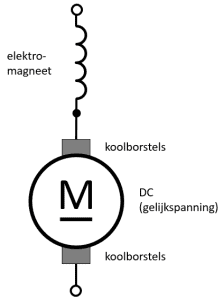
Bij een parallelmotor, ook wel shuntmotor genoemd, zijn de veldwikkelingen parallel geschakeld aan de ankerwikkeling. Hierdoor blijft de stroom door de veldwikkeling relatief constant, ongeacht de belasting van de motor. Dit resulteert in een stabiele magnetische flux en een nagenoeg constant toerental, zelfs bij wisselende belastingen. De kracht die de motor produceert, is evenredig aan de stroom door de ankerwikkeling, wat zorgt voor een soepele werking bij verschillende snelheden.
Een shuntmotor toegepast in systemen waar een gecontroleerd toerental en langdurige werking vereist zijn, zoals een elektrische koelventilator, brandstofpomp, ruitenwissermotor of elektrische waterpomp.
Seriemotor:
Bij een seriemotor zijn de veldwikkelingen in serie geschakeld met de ankerwikkeling, waardoor dezelfde stroom door beide wikkelingen loopt. Hoe groter de stroom die door de motor vloeit, hoe sterker het magnetisch veld wordt. Dit betekent dat de magnetische flux toeneemt wanneer de belasting groter wordt, wat leidt tot een hoger koppel (draaimoment). Hierdoor presteert een seriemotor bijzonder goed bij hoge belastingen. De snelheid van de motor neemt echter af bij een toenemende belasting, omdat de extra magnetische flux het koppel vergroot, maar tegelijkertijd de snelheid verlaagt.
Bij het inschakelen ontstaat een sterke magnetische flux, omdat de stroom door zowel de veld- als de ankerwikkeling hoog is. Hierbij levert hij een hoog startkoppel. Dit maakt de seriemotor zeer geschikt als startmotor, vooral onder zware omstandigheden, zoals bij een koude motor of een lage accuspanning. Andere toepassingen van seriemotoren zijn: elektrische lieren, aandrijving van vorkheftrucks.
Een seriemotor heeft een hoger aanloopkoppel dan een parallalmotor om de volgende redenen:
- het aanloopkoppel wordt direct hoog wanneer de elektromotor nog stilstaat;
- er is vanaf stilstand nog geen tegenspanning opgewekt,
- de stroomsterkte is op het moment van aansturen maximaal.
Het aanloopkoppel van een parallelmotor (shunt) en seriemotor kunnen met elkaar worden vergeleken. De formule om het aanloopkoppel van een elektromotor te berekenen is:

T = koppel [Nm]
F = lorentzkracht [N]
B = magnetische flux in Tesla [wb/m2]
I = stroomsterkte [Ampére]
l = lengte koperdraad [m]
d = diameter anker [m]
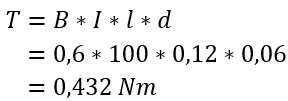
Voor het invullen van werkelijke waarden in de formule T = B * I * l * d, kunnen we aannames doen op basis van typische waarden voor shunt- en seriemotoren in voertuigen. Een seriemotor heeft in beginsel een hogere stroom (I) en daardoor een hogere magnetische flux (B) dan een parallelmotor. Wanneer de andere gegevens (lengte van het koperdraad en de diameter van het anker) gelijk zijn aan elkaar, kunnen we het opgewekte koppel tussen beide motoren bekijken.
Eerst wordt de tabel met de eigenschappen van beide motoren getoond.
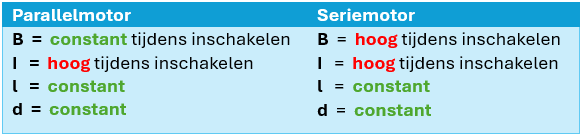
In de bovenstaande tabel is te zien dat de I (stroomsterkte) bij beide motoren hoog is, maar dat de B magnetische flux) bij de seriemotor hoog is tijdens inschakelen, terwijl deze bij de parallelmotor constant blijft.
Als we deze beredeneren in een formule, en daarbij een 1 gebruiken bij constant en een 2 bij hoog, zien we dat het opgewekte koppel van de seriemotor hoger is:
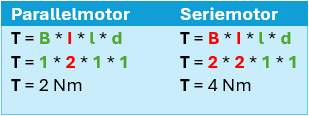
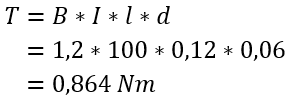
Als uw voorkeur uitgaat naar het rekenen met getallen in plaats van het redeneren met een 1 of 2 voor constant of hoog, kunt u de onderstaande ingevulde formules bekijken, waarin de parallel- en seriemotoren met elkaar worden vergeleken. Hierbij zijn de magnetische flux (B) en het aanloopkoppel (I) variabelen, en zijn l en d gelijk aan elkaar. Het koppel van de seriemotor is in dit geval ook beduidend hoger.
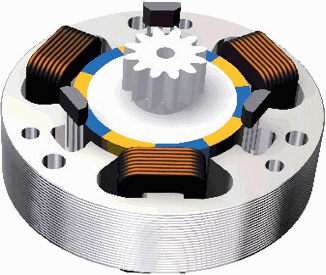
DC elektromotor zonder koolborstels:
De borstelloze gelijkstroommotor (DC) is een synchrone motor. De elektrische aansturing is in de plaats van de koolborstels gekomen. Dit type elektromotor lijkt erg veel op de synchrone AC-motor met permanente magneten, zoals toegepast in de aandrijflijn van elektrische voertuigen. Het voornaamste verschil tussen beide motoren is de aansturing: de AC-motor wordt met een gemoduleerde sinusvormige wisselspanning aangestuurd en de DC-motor met een blokspanning.
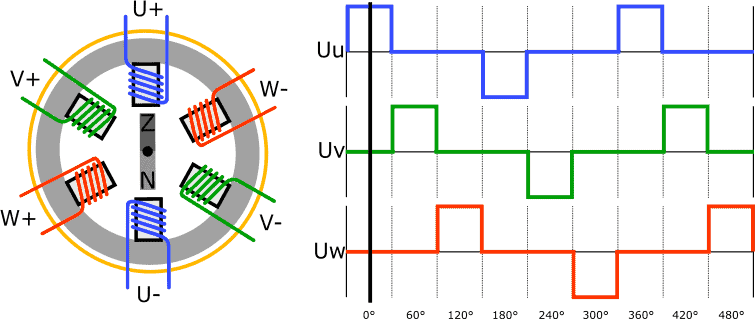
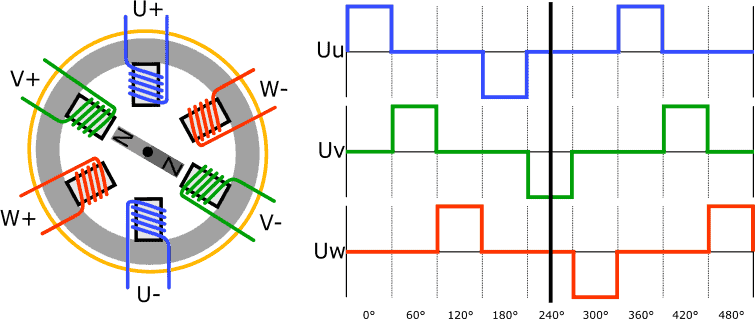
De stator bevat vaak drie of zes spoelen (U, V en W) en de rotor is een permanente magneet. De onderstaande afbeelding toont de schematische opbouw van de DC-motor met daarnaast het spanningsverloop door de drie spoelen. Tussen de polen zijn in werkelijkheid meerdere Hall-sensoren aangebracht om de rotorstand te bepalen.
De regeleenheid bepaalt aan de hand van de rotorstand welke spoelen hij moet aansturen.
In de volgende afbeelding is de U+ spoel bekrachtigd. De manier van wikkelen van de spoel om de pool bepaalt of het een noord- of zuidpool wordt. In dit voorbeeld is de U+ de noordpool en de U- de zuidpool.
De rotor is uitgevoerd als permanente magneet. Zoals bij de voorgaande paragrafen al is beschreven, positioneert of verdraait de rotor zich als gevolg van een wisselend magnetisch veld door de spoelen.
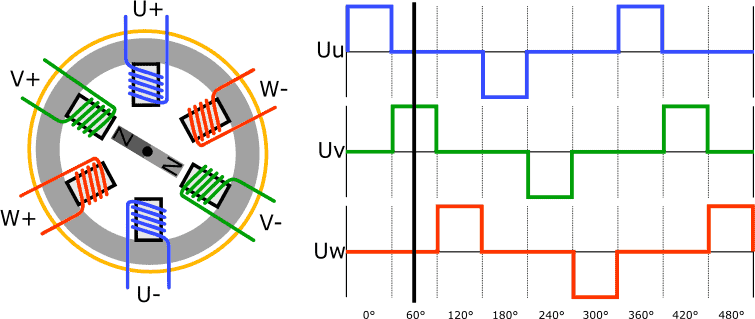
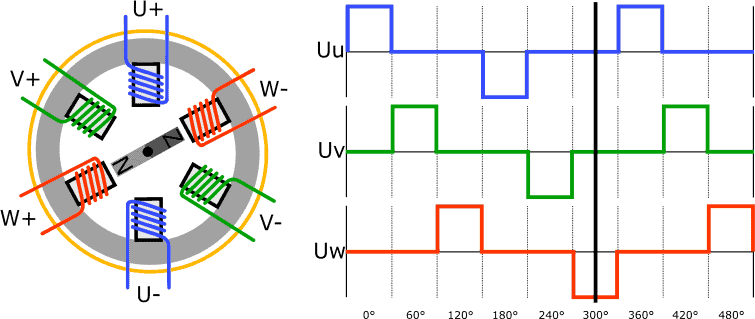
Om de rotor vanuit de positie als aangegeven in de voorgaande afbeelding linksom te laten draaien, worden de V-spoelen bekrachtigd.
De V+ wordt de noordpool, V- de zuidpool. De rotor met permanente magneet verdraait;
de noord- en zuidpool trekken elkaar aan, evenals de zuid- en noordpool aan de andere kant van de magneet.
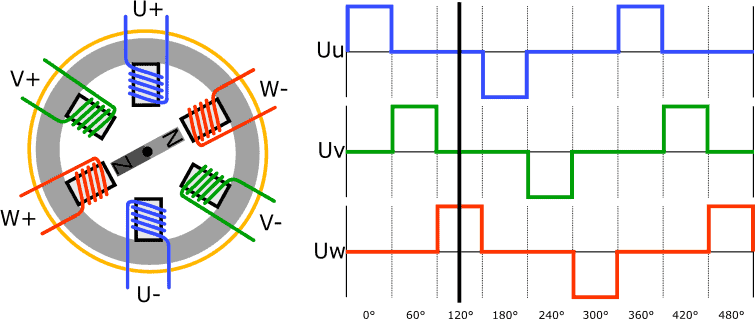
Nu worden de W-spoelen bekrachtigd om de rotor weer 60 graden verder te laten verdraaien.
De W+ spoel wordt een noordpool en W- de zuidpool. De rotor verdraait en neemt zijn nieuwe positie in.
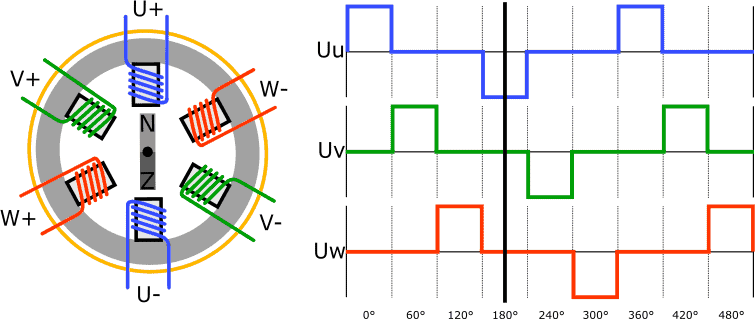
De rotor in de volgende afbeelding is sinds de eerste situatie 180 graden verdraaid; in de eerste afbeelding stond de zuidpool naar boven gericht; nu is dat de noordpool.
De polariteit van de U+ spoel en de U- spoel is omgedraaid, waardoor de stroom omgekeerd door de spoelen loopt. Daarmee is de U+ een zuidpool, en de U- een noordpool geworden.
De rotor met permanente magneet wordt door de verandering van het magnetisch veld verder verdraait.
Om de rotor opnieuw 60 graden te verdraaien wordt van de V- een noordpool en de V+ een zuidpool gemaakt. De rotor neemt de nieuwe positie in.
Wederom verdraait de rotor 60 graden als gevolg van verandering van het magnetische veld in de spoelen:
De W- spoel is de noordpool en de W+ de zuidpool.
In de zes situaties die hierboven zijn beschreven, zijn er constant twee spoelen tegelijk bekrachtigd. We vinden vaak ook borstelloze DC-motoren met drie spoelen in plaats van zes. Met drie spoelen worden de U- V- en W-spoelen ook achter elkaar bekrachtigd, maar vindt er geen wisseling in polariteit plaats.
De borstelloze DC-motor is een krachtige motor die geschikt is voor toepassingen waar een groot koppel benodigd is voor zowel opstarten, gemiddelde snelheid als hoge snelheden. De borstelloze DC-motor en de stappenmotor worden vaak door elkaar gehaald. Dit is niet zo gek, want de werking en aansturing van de motoren hebben vele overeenkomsten: beide motoren worden aangedreven door een magnetisch veld te creëren tussen de spoelen en de rotor met permanente magneten. Toch hebben beide motoren naast de termenalogie wezenlijke verschillen in voornamelijk de toepassing en daarvoor materiaalkeuze.
De stappenmotor is in feite een borstelloze DC-motor, maar wordt op een ander gebied toegepast. Daar waar de DC-motor vooral wordt gebruikt voor langdurig draaien met hoge toerentallen, zien we de stappenmotor in toepassingen waar een verstelling in een exacte positie het belangrijkste is.
De aansturing van de getoonde DC-motor vindt iedere 60° verdraaiing van de rotor plaats. Eventueel zou dat kunnen worden verlaagd naar 30° als we tussen iedere aansturing vier spoelen tegelijk bekrachtigen, en daarmee een tussenstand krijgen. Echter, een stappenmotor is in staat om stapjes van 1,8° tot wel 0,9° te verstellen. Dit laat temeer zien dat de stappenmotor geschikt is voor zeer nauwkeurige posities.
De verschillende uitvoeringen, de aanstuurmethoden door de ECU en de toepassingen, vindt u op de pagina stappenmotor.

Gerelateerde pagina’s: